
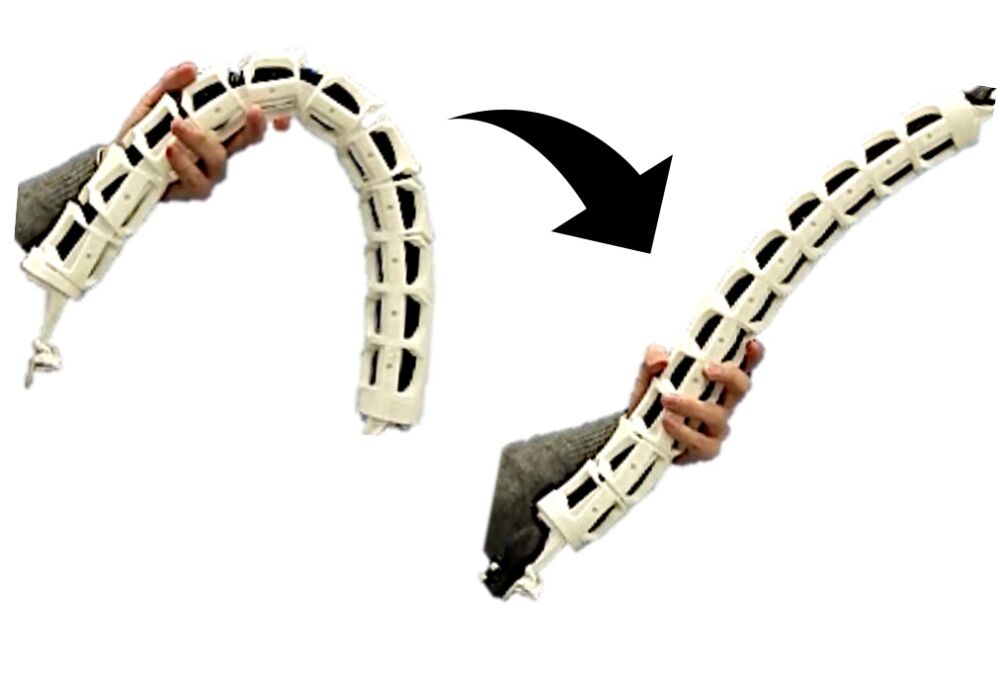
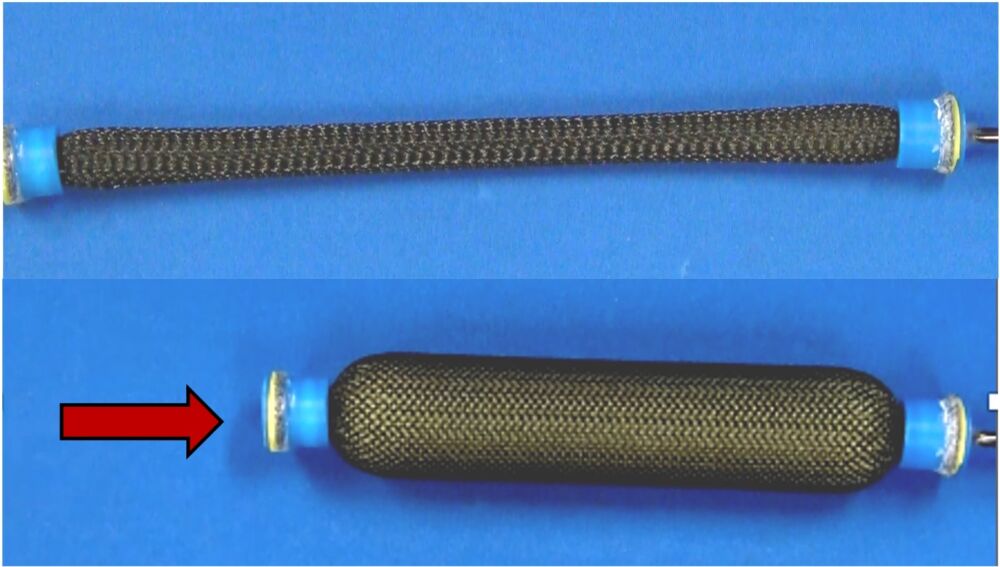
近畿大学ソフトロボット制御学研究室では,空気圧駆動の人工筋肉を用いた動作支援装置の開発や,ソフトロボットに関する研究に取り組んでいます.これまでには,人工筋を用いた可変剛性機構を開発し,装着者の姿勢保持を支援可能な体幹装置を提案しています.現在は姿勢保持だけではなく,歩行時の体幹回旋運動を許容する機構も導入し,姿勢を保持しながら,回旋運動を支援することも可能な装置を開発しています.これらは全て空気圧を駆動源としたロボット機構となっており,駆動時でも空気の力で人間に対して優しい支援を提供することが可能となっています.また,基礎研究にも取り組んでおり,所望の収縮力特性を持つ人工筋を設計するための数理モデルの構築にも取り組んでいます.